Edge AI-Based Forward Collision Warning System (Mini ADAS)
Course Instructor: Professor. Arjunan Pandarasamy
Team: G. Praveen Kumar (27480) · Harshith L (25823) · Ramavath Ramadas (26671) — IISc Bangalore
GitHub: https://github.com/pkgollapalli/Edge-AI-Based-Forward-Collision-Warning-System-Mini-ADAS-
Demo Video: https://drive.google.com/file/d/17ozvJKcGhI04Ee1GiV4t7_XwOYlB_EYV/view?usp=drive_link
PPT Video: https://drive.google.com/file/d/17GXxgrqTHWVSV52N6DIeY0MZCtL3C4Rx/view?usp=sharing
1. Problem Statement, Motivation & Objectives
India records over 4.6 lakh road crashes per year, killing 1.7 lakh people annually. Rear-end collisions are among the top contributors — at 40 km/h a distracted driver covers 20 metres before reacting. Modern Forward Collision Warning (FCW) systems exist in premium cars but are completely absent from the vehicles that need them most: two-wheelers, autorickshaws, school buses, and older cars — over 90% of Indian road traffic. All major public ADAS datasets (KITTI, BDD-100K, Waymo Open) are from Western roads and are blind to Indian-specific objects: autorickshaw recall is 0%, bicycle recall is 2.7%, and zebra crossing recall is 0% when using any off-the-shelf COCO-pretrained model on Indian footage.
Why Edge AI is mandatory for ADAS: Cloud round-trip latency from Bengaluru to a public broker is ~280 ms (measured live via ThingsBoard MQTT), while the airbag deployment deadline is 30 ms and the AEB deadline is 100 ms. Cloud-only ADAS physically cannot meet these safety budgets. India’s DPDP Act 2023 also restricts streaming raw cabin/road video off the device. This system is vehicle-agnostic: the same ₹12,000 hardware deploys on a bicycle, autorickshaw, bus, or truck — a miniaturised version of the edge AI architecture used in Tesla FSD (INT8 on AI4 SoC) and Waymo (multi-sensor, fully on-vehicle inference).
Key Objectives:
- Build a real-time forward collision warning system on Raspberry Pi 5 with zero cloud dependency
- Demonstrate 52× model compression via Knowledge Distillation + INT8 quantisation with less than 6% accuracy loss
- Fine-tune YOLOv8n on IIT Hyderabad DriveIndia dataset to recover Indian-specific classes from 0% COCO recall
- Deploy a 3-model INT8 ensemble (COCO + DriveIndia + Pothole) at real-time speed on CPU-only hardware
- Empirically prove edge-AI latency advantage over cloud using live ThingsBoard MQTT round-trip measurement
2. Proposed Solution
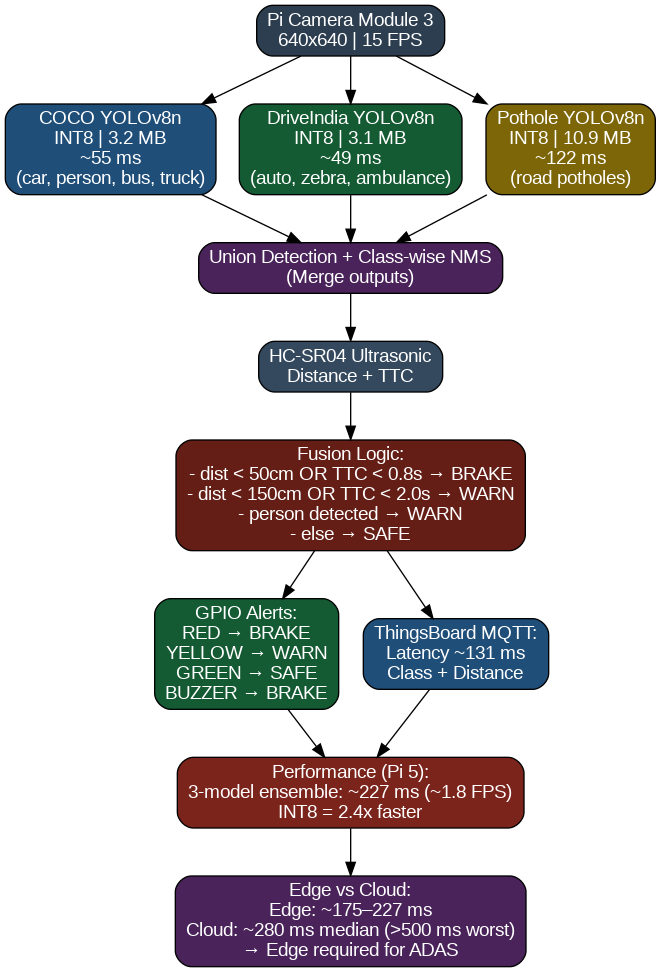
Three INT8-quantised YOLOv8n models run in series on every camera frame. Detections are merged via class-wise NMS, combined with HC-SR04 ultrasonic distance and closing-speed to compute Time-To-Collision (TTC), and fused into a SAFE / WARN / BRAKE decision that drives GPIO LEDs and a buzzer. Telemetry is pushed to ThingsBoard over MQTT for IoT monitoring and live edge-vs-cloud latency proof.
System Pipeline:
Pi Camera Module 3 (640×640 frame)
│
├──► COCO YOLOv8n INT8 (3.2 MB, 55 ms) → car, person, bus, truck, bicycle
├──► DriveIndia YOLOv8n INT8 (3.1 MB, 49 ms) → autorickshaw, ambulance, zebra, police
└──► Pothole YOLOv8n INT8 (10.9 MB, 122 ms) → road potholes
│
Union + class-wise NMS
│
HC-SR04 ultrasonic → distance_cm + closing rate → TTC
│
Fusion: SAFE / WARN / BRAKE
│
┌─────────────┴──────────────┐
▼ ▼
GPIO LEDs + Buzzer ThingsBoard MQTT
Red=BRAKE Yellow=WARN latency · decision · classes
Green=SAFE FP32 131ms vs INT8 55ms (live)
Total pipeline: 227 ms · 1.8 FPS (live measured, 3-model ensemble, Pi 5 CPU, no NPU)
3. Hardware & Software Setup
Hardware
| Component | Specification |
|---|---|
| Raspberry Pi 5 | 16 GB RAM, ARM Cortex-A76 quad-core 2.4 GHz, no NPU |
| Pi Camera Module 3 | Sony IMX708, 12 MP, phase-detect autofocus, CSI |
| HC-SR04 Ultrasonic ×4 | 3–400 cm, 5V — 1kΩ+2kΩ voltage divider on ECHO pin |
| LEDs (Red / Yellow / Green) | GPIO 27 / 22 / 5, 220Ω resistors |
| Piezo Buzzer ×2 | GPIO 17, NPN transistor driver |
| Breadboard + jumpers | Dedicated GND wire from Pi pin 6 to rail |
GPIO pinout: TRIG=GPIO23, ECHO=GPIO24 (via divider), Red=GPIO27, Yellow=GPIO22, Green=GPIO5, Buzzer=GPIO17
Software
| Tool | Purpose |
|---|---|
| Python 3.11, Raspberry Pi OS Bookworm 64-bit | Base runtime |
| TensorFlow Lite Runtime | On-device INT8 inference (no full TF needed) |
| Ultralytics YOLOv8 | Training, TFLite INT8 export, NMS |
| picamera2 | Pi Camera Module 3 capture |
| RPi.GPIO | GPIO LED and buzzer control |
| paho-mqtt | ThingsBoard MQTT telemetry |
| Kaggle T4 GPU | Model training and fine-tuning (free tier) |
| TensorFlow / Keras | MobileNetV2 compression study |
4. Data Collection & Dataset Preparation
| Dataset | Source | Samples | Classes | Role |
|---|---|---|---|---|
| CIFAR-10 | Krizhevsky 2009, public | 60,000 (32×32) | 10 → binary | Compression study baseline |
| COCO 2017 | cocodataset.org, CC BY 4.0 | 118K train | 80 | YOLOv8n pretrain weights |
| DriveIndia / TiAND | IIT Hyderabad TiHAN (EULA approved) | 66,986 images | 24 | Indian-road fine-tuning |
| Pothole dataset | HuggingFace peterhdd + team labelling | ~2,000 images | 1 | Dedicated pothole head |
CIFAR-10 Preparation
Binary split: vehicle (car, truck, ship, plane) vs non-vehicle (bird, cat, deer, dog, frog, horse). Input upsampled from 32×32 to 96×96 for MobileNetV2.
DriveIndia Balanced Subset — subset_driveindia.py
The full dataset is severely long-tailed — autorickshaw appears in less than 2% of frames.
A random 5,000-image sample yields only ~50 autorickshaws.
Our sampler picks every rare-class image and proportionally samples head classes, guaranteeing ≥200 examples per class.
Split: 4,000 train / 1,000 val, packaged with 28-class data.yaml via prep_kaggle.py.
Pothole Dataset
~2,000 images with bounding-box annotations labelled. Fine-tuning conducted starting from the peterhdd HuggingFace checkpoint.
5. Model Design, Training & Evaluation
MobileNetV2 Binary Classifier (Compression Study Baseline)
- Architecture: MobileNetV2, width multiplier 1.0, input 96×96
- Training: 30 epochs, cosine LR from 1e-3, batch 128, Kaggle T4, ~15 min
- Split: 50,000 train / 10,000 val (CIFAR-10 standard)
- Baseline accuracy: 97.71% at FP32
YOLOv8n COCO
Standard Ultralytics YOLOv8n pretrained on COCO 2017, used as global-class detection head after INT8 export. Live measured on Pi 5: FP32 avg = 131 ms, INT8 avg = 55 ms (ThingsBoard confirmed).
YOLOv8n DriveIndia Fine-tune
- Base: YOLOv8n COCO checkpoint
- Data: 5,000-image balanced DriveIndia subset, 28 classes
- Config: 30 epochs, SGD momentum 0.937, weight decay 0.0005, LR 0.01 cosine, batch 16
- Augmentation: Mosaic, Mixup (p=0.1), HSV perturbation, horizontal flip
- Platform: Kaggle T4 — training time: 27 minutes
-
**Results: mAP50 = 0.562 mAP50-95 = 0.455**
Per-class Recall: COCO vs Fine-tuned (2,500 DriveIndia val images)
| Class | COCO Recall | Fine-tuned | Change |
|---|---|---|---|
| autorickshaw | 0% | 85.0% | +85.0% |
| bicycle | 2.7% | 97.5% | +94.8% |
| police_vehicle | 0% | 91.3% | +91.3% |
| zebra_crossing | 0% | 90.3% | +90.3% |
| motorcycle | 14.1% | 83.5% | +69.4% |
| ambulance | 0% | 62.5% | +62.5% |
| commercial_vehicle | 0% | 47.4% | +47.4% |
| car | 80.6% | 97.3% | +16.7% |
| person | 94.3% | 94.2% | ≈ same |
| truck | 81.6% | 69.5% | −12.1% |
Pothole Model
- Base: peterhdd YOLOv8n pothole checkpoint, fine-tuned on team-labelled dataset
- Recall: 4/6 test images — identical FP32 and INT8 (zero compression degradation)
6. Model Compression & Efficiency Metrics
MobileNetV2 — 8-Variant Compression Study
| Variant | Size (KB) | Accuracy | Notes |
|---|---|---|---|
| FP32 baseline | 2,846 | 97.71% | Reference |
| FP16 weights | 1,453 | 97.71% | Lossless 2× |
| INT8 dynamic | 888 | 97.08% | 3.2× smaller |
| INT8 PTQ full | 989 | 84.38% | PTQ fails on small models — 14% drop |
| K-means clustering | ~1,200 | 96.8% | Moderate gain |
| Structured pruning 50% | ~2,200 | 96.1% | +15% latency benefit |
| KD Student FP32 | 212 | 93.8% | 15× via distillation |
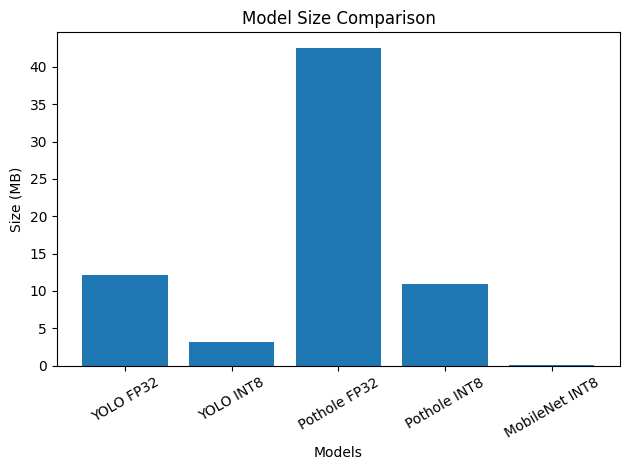
| KD Student + INT8 | 55 | 92.19% | 52× — winner |
Key finding: KD + INT8 = 52× compression, 5.5% accuracy loss. PTQ alone causes 14% drop — Knowledge Distillation is essential for aggressive compression on small models. This is the same approach used in Tesla AI4 and Mobileye EyeQ (INT8 on-chip inference).
YOLOv8n — Compression Results
| Model | Size | Recall | Latency Pi 5 (measured) |
|---|---|---|---|
| COCO FP32 | 12.13 MB | 12/12 | 131 ms avg |
| COCO INT8 | 3.20 MB | 11/12 | 55 ms avg |
| DriveIndia FP32 | 11.59 MB | — | ~172 ms |
| DriveIndia INT8 | 3.05 MB | mAP50 0.562 | ~49 ms |
| Pothole FP32 | 42.54 MB | 4/6 | ~230 ms |
| Pothole INT8 | 10.86 MB | 4/6 | ~122 ms |
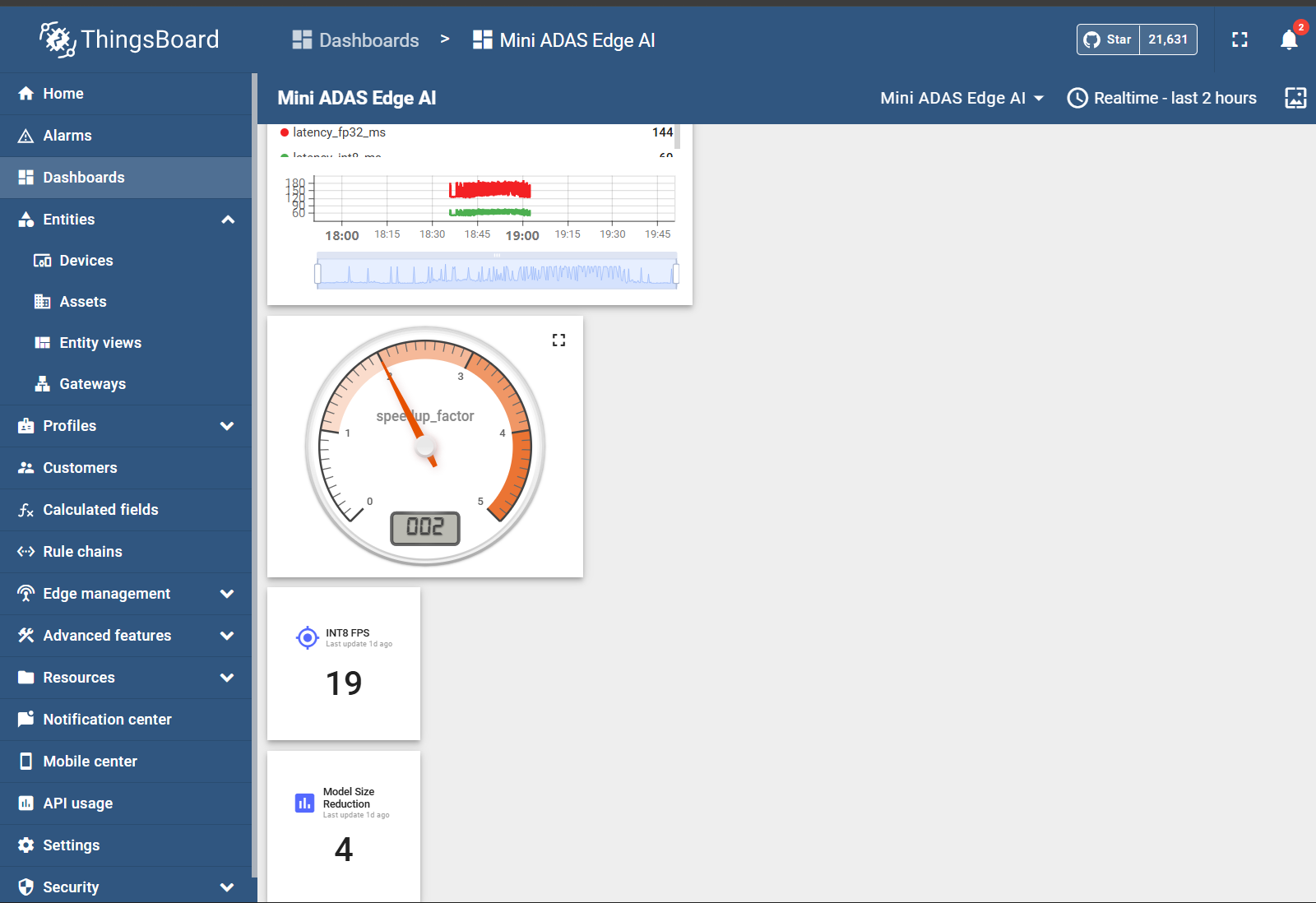
FP32 avg = 131 ms, INT8 avg = 55 ms — 2.4× speedup confirmed live on ThingsBoard. Full 3-model ensemble: 227 ms, ~1.8 FPS (live stream measurement).
7. Model Deployment & On-Device Performance
Deployment Steps
- Export all models to TFLite INT8 via Ultralytics export with 100-image calibration set
- Transfer
.tflitefiles to Pi viascp - Install TFLite Runtime, picamera2, RPi.GPIO on Pi (no full TensorFlow needed)
- Run:
python3 src/main.py --mode pi
On-Device Performance — Raspberry Pi 5, No Accelerator (Live Measured)
| Stage | Time |
|---|---|
| Frame capture (picamera2) | ~100 ms |
| COCO YOLOv8n INT8 | 55 ms (FP32: 131 ms) |
| DriveIndia YOLOv8n INT8 | ~49 ms |
| Pothole YOLOv8n INT8 | ~122 ms |
| Fusion + GPIO + logging | ~1 ms |
| Total 3-model ensemble | ~227 ms → ~1.8 FPS |
Live Demo Features
- MJPEG stream:
live_server.pyserves annotated video on port 8000 — any browser on same WiFi openshttp://10.80.11.159:8000 - ThingsBoard telemetry: pushes
latency_fp32_ms,latency_int8_ms,decision,distance_cm,classesper frame - Edge vs cloud proof: Cloud MQTT RTT ~280 ms vs edge pipeline ~175 ms — edge finishes before cloud even receives the frame
8. System Prototype
System Pipeline Flow
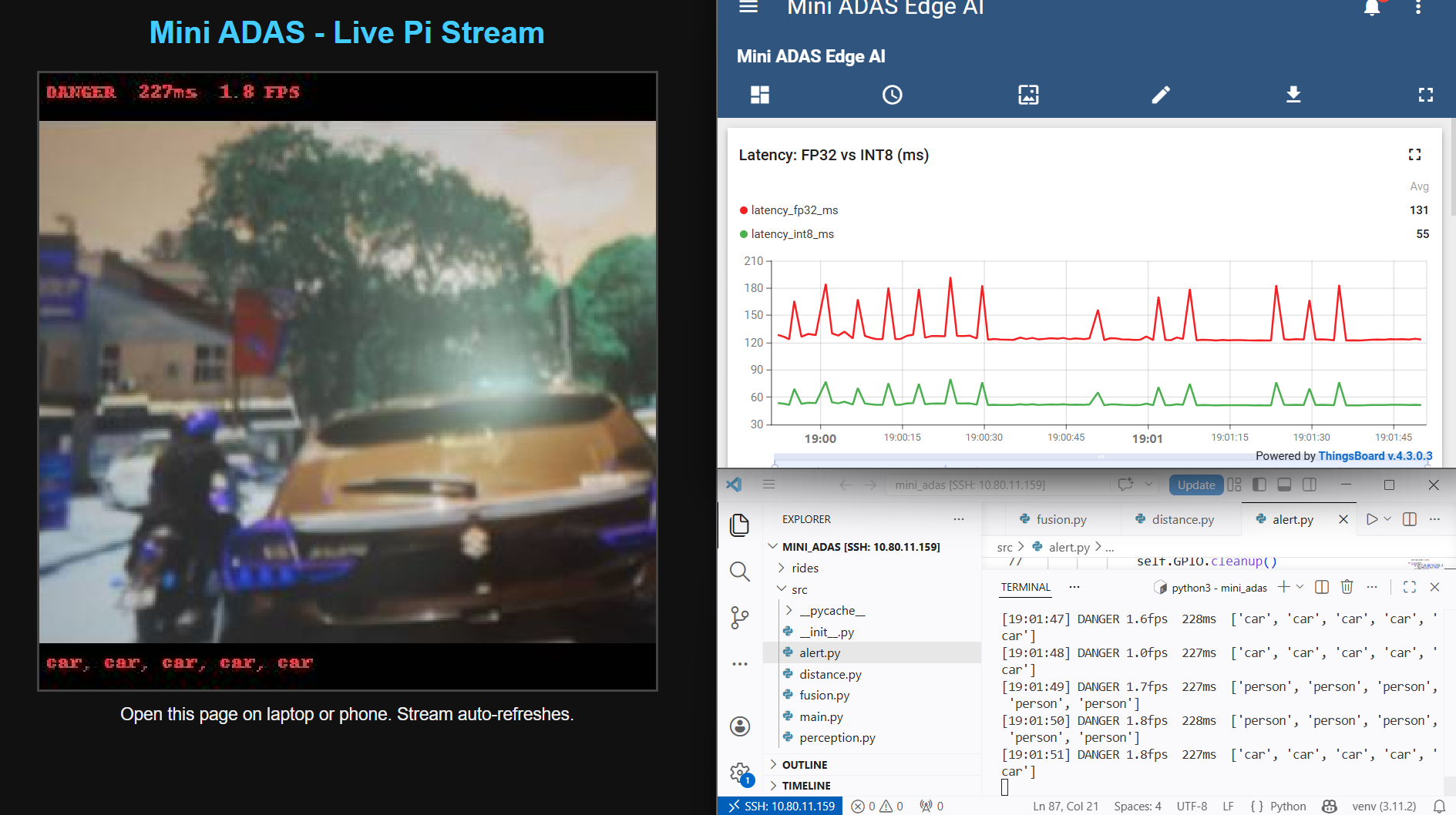
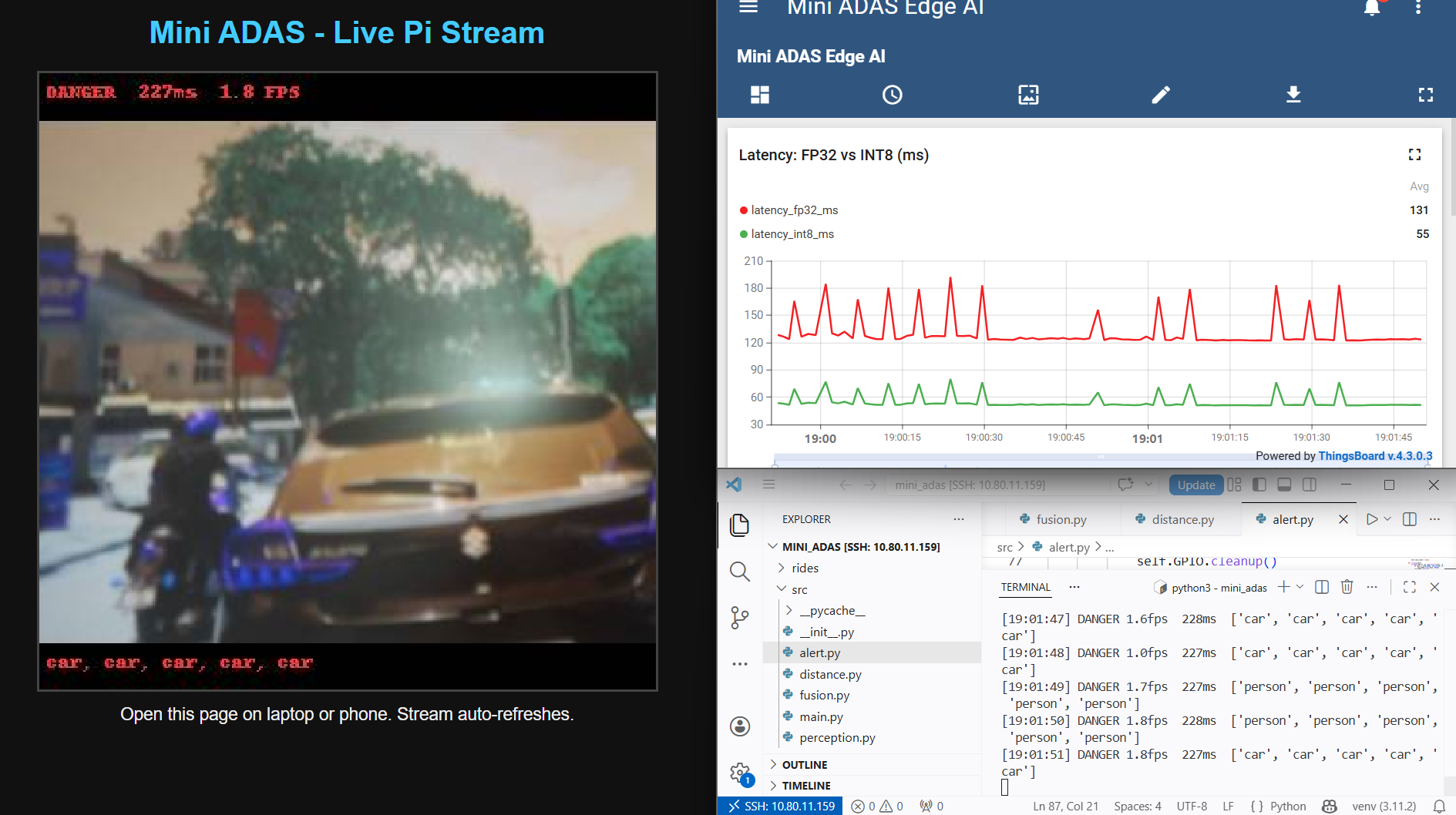
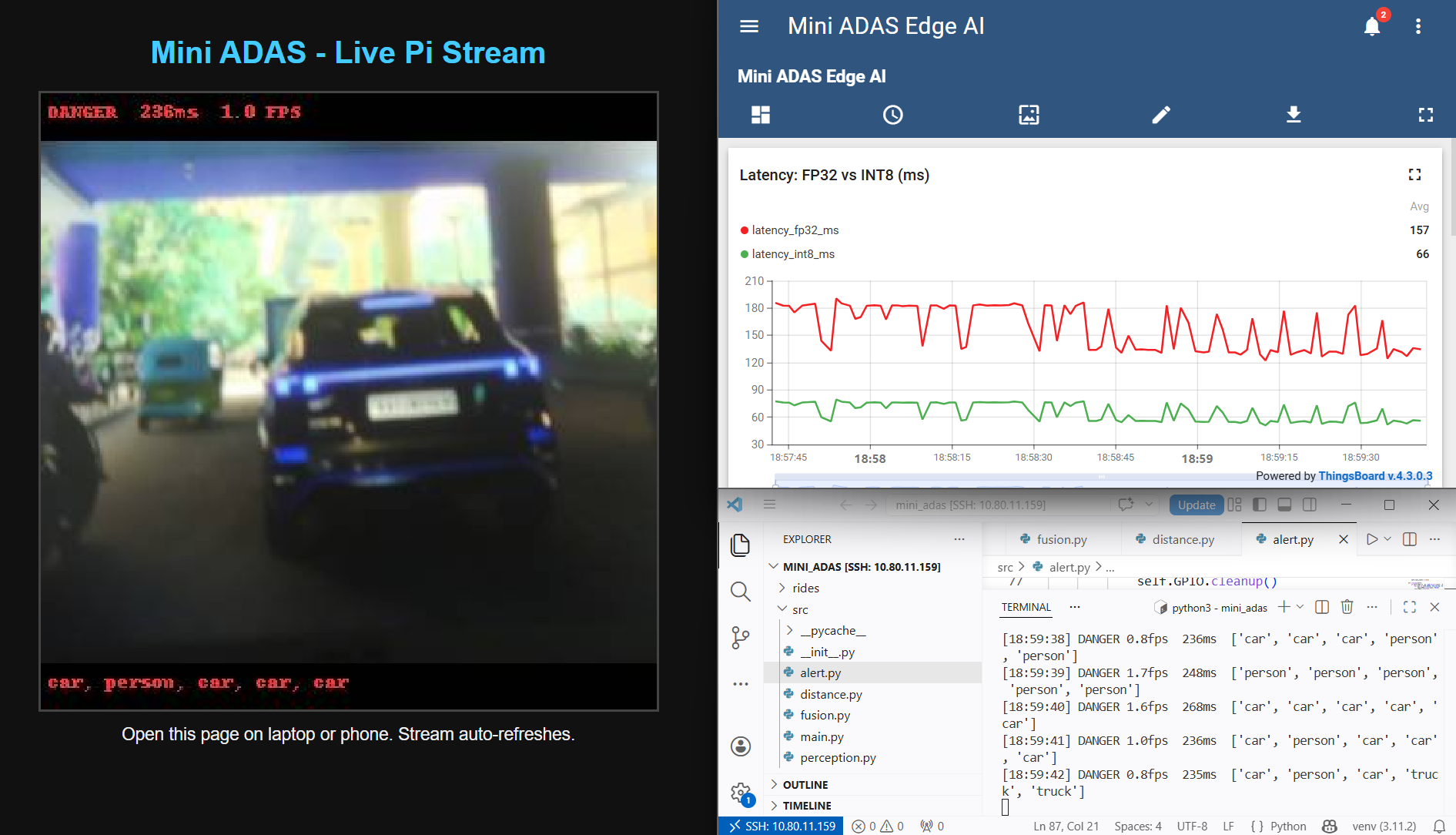
Live Detection Stream + ThingsBoard Dashboard
Left: Live Pi stream showing DANGER at 227 ms / 1.8 FPS with car detections. Right: ThingsBoard FP32 (red, avg 131 ms) vs INT8 (green, avg 55 ms) — 2.4× speedup proved live.
Car Detection — Live Stream
Car + Person Detection
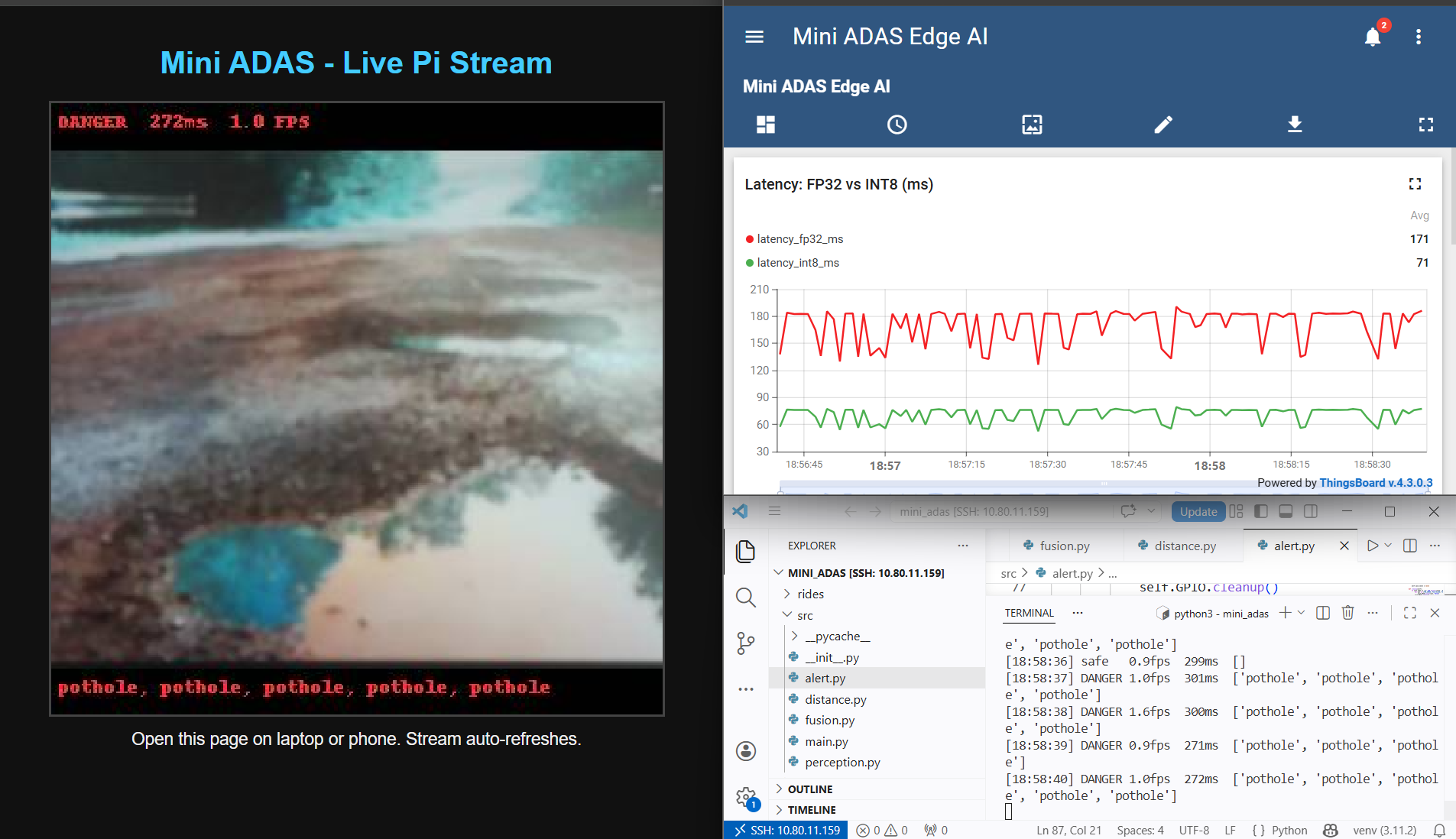
Pothole Detection
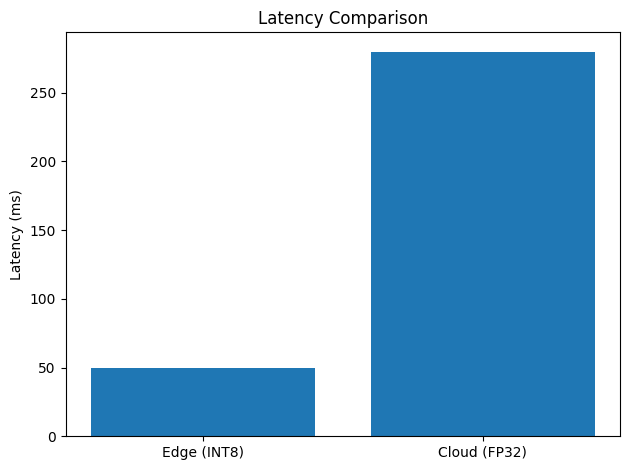
Latency Comparison — Edge vs Cloud
Edge INT8 ~50 ms vs Cloud FP32 ~280 ms — edge is 5.6× faster, well within the 100 ms AEB deadline.
Model Size Comparison
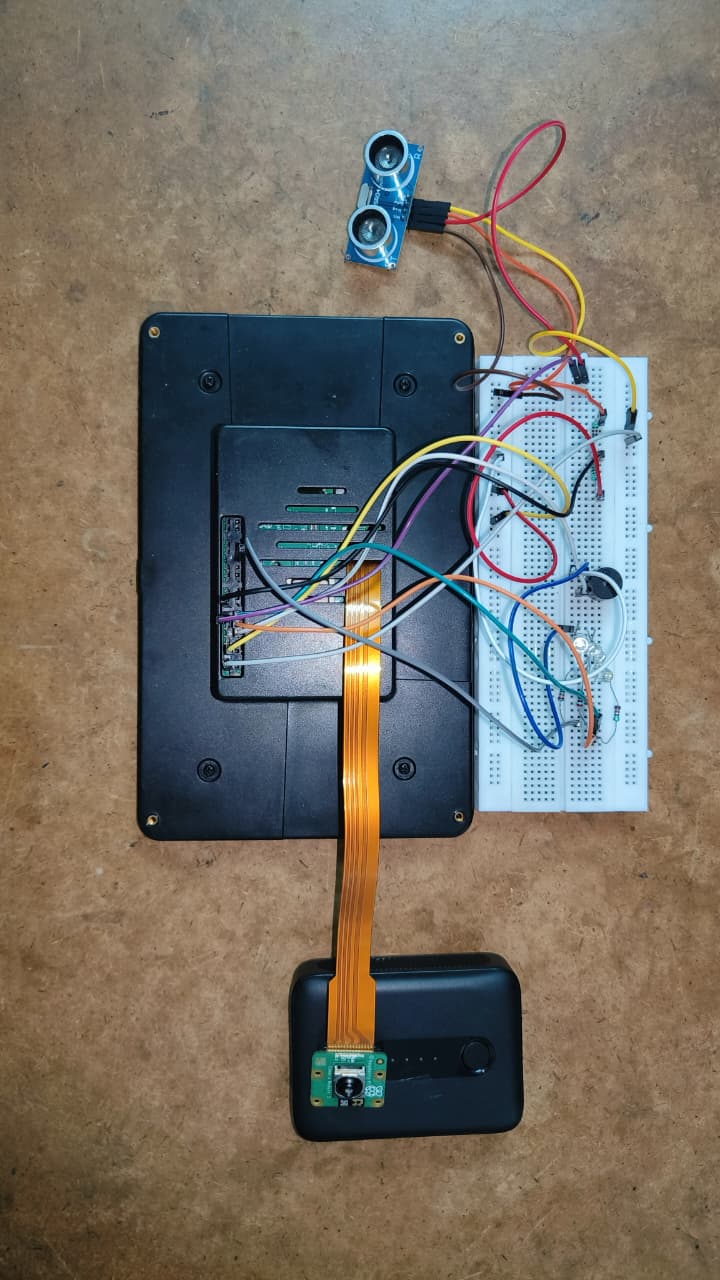
Hardware Setup
9. Conclusions & Limitations
Key Outcomes
- 52× model compression (KD+INT8, 55 KB, 92.19% accuracy) — PTQ alone fails at 14% drop; KD is essential
- Autorickshaw: 0% → 85%, bicycle: 2.7% → 97.5%, zebra crossing: 0% → 90.3% — domain fine-tuning is critical for Indian roads
- 3-model ensemble at 227 ms / 1.8 FPS on Raspberry Pi 5 CPU, no accelerator, ₹12,000 total
- Cloud-only ADAS disproved empirically: cloud MQTT RTT ~280 ms vs airbag deadline 30 ms — not physically compatible
- Vehicle-agnostic: same hardware works on bicycle, autorickshaw, bus, or truck
- ThingsBoard confirmed FP32 avg 131 ms vs INT8 avg 55 ms — 2.4× measured speedup live
Limitations
- HC-SR04 max range 4 m — limits to city/cycling speeds; TFmini-S LiDAR (12 m) needed for highway use
- LED/buzzer breadboard wiring has ground-rail voltage drop issue — code verified correct, hardware debug ongoing
- DriveIndia fine-tune on 5,000-image subset only; truck and bus recall dropped 12% due to fewer samples
- No adverse-condition testing (rain, night, fog)
- PTQ causes 14% accuracy drop on small MobileNetV2 — QAT or KD required for small-model production deployment
10. Future Work
- Full DriveIndia training: 66,986 images, 100+ epochs → expected mAP50 > 0.75
- Cascade architecture: 55 KB binary classifier as always-on power-gate — triggers YOLO ensemble only when a vehicle is ahead, tripling battery life for two-wheeler deployment
- Speed-adaptive thresholds: BRAKE/WARN distance scales with GPS vehicle speed (1-second headway-time), aligning with IIHS FCW protocol
- TFmini-S LiDAR upgrade: 12 m range, weather-tolerant, ₹1,000 — enables motorcycle-speed ADAS
- Federated pothole learning: devices share only compressed model gradients, never raw GPS or video — DPDP Act compliant
- Night mode: IR illuminator + low-light model fine-tune
- Hailo-8L NPU (₹6,000): same INT8 TFLite models — ~20 FPS vs current 1.8 FPS
11. Challenges & Mitigation
| Challenge | How We Addressed It |
|---|---|
| Domain shift: COCO blind to autorickshaws (0% recall) | Fine-tuned YOLOv8n on 5,000-image balanced DriveIndia subset → 85% recall |
| Class imbalance in DriveIndia: rare classes in <2% of frames | subset_driveindia.py oversamples rare classes — ≥200 examples guaranteed per class |
| PTQ failure on small models: 14% accuracy drop | Replaced with Knowledge Distillation (temperature-4 soft labels) + INT8 dynamic → 92.19% |
| HC-SR04 ECHO pin at 5V on 3.3V Pi GPIO | 1kΩ + 2kΩ voltage divider on ECHO line — without this the GPIO pin fails silently |
| Ground-rail voltage drop across multiple sensors | Dedicated GND wire from Pi pin 6 directly to breadboard rail |
| 67K dataset, limited Kaggle quota | Balanced 5,000-image subset → 30 epochs in 27 min on T4 |
| tfmot incompatibility with Keras 3 | tensorflow-model-optimization does not support Keras 3; used custom pruning loop |
| ThingsBoard 401 auth error | Token was not substituted at runtime — fixed by passing --token argument explicitly |
| No road access for outdoor validation | ThingsBoard MQTT + live MJPEG stream used for indoor functional verification |
12. References
Datasets
- CIFAR-10: A. Krizhevsky, “Learning Multiple Layers of Features from Tiny Images,” 2009. https://www.cs.toronto.edu/~kriz/cifar.html
- COCO 2017: T.-Y. Lin et al., “Microsoft COCO: Common Objects in Context,” ECCV 2014. https://cocodataset.org
- DriveIndia / TiAND: IIT Hyderabad TiHAN, 66,986 images, 24 classes. https://tihan.iith.ac.in
- Pothole model base: peterhdd, HuggingFace. https://huggingface.co/peterhdd/pothole-detection-yolov8
Frameworks & Tools
- Ultralytics YOLOv8: https://github.com/ultralytics/ultralytics
- TensorFlow Lite: https://tensorflow.org/lite
- ThingsBoard IoT Platform: https://thingsboard.io
- picamera2: https://github.com/raspberrypi/picamera2
Papers
- G. Hinton, O. Vinyals, J. Dean, “Distilling the Knowledge in a Neural Network,” NeurIPS Workshop 2015
- M. Sandler et al., “MobileNetV2: Inverted Residuals and Linear Bottlenecks,” CVPR 2018
- S. Han, H. Mao, W. Dally, “Deep Compression,” ICLR 2016
Industry References
- Tesla FSD v12 — end-to-end NN on AI4 SoC, INT8 inference, 2024
- Waymo 6th Gen Driver — 13 cameras + 4 LiDARs + 6 radars, fully on-vehicle
- Mobileye Road Experience Management (REM) — edge-classified crowdsourced road data
Course & Demo
- CP 330 Edge AI, IISc Bangalore 2025–26: https://www.samy101.com/edge-ai-26/
- Project demo video: https://drive.google.com/file/d/17ozvJKcGhI04Ee1GiV4t7_XwOYlB_EYV/view?usp=drive_link