AI Powered Smart Helmet for Traffic Sign Detection with 120 degree FoV
Team: Sana Sreyas, Abel Thomas Titus, Joffin Jacob, Simhadri Vishnukumar
Code: GitHub Repository
This Edge Impulse project implements a real-time, high PoV, on-device road sign detection and alerting system using the Arduino Nicla Vision. The goal is to prototype an “AI Helmet” that can detect critical road signs and provide immediate alerts to two-wheeler riders.
Key Features
-
Fully on-device Edge AI – Detection and alerts run entirely on the Arduino Nicla Vision using TinyML + FOMO, eliminating the need for cloud connectivity or smartphone support for core operation.
-
Compact yet high-performance model – Uses a FOMO MobileNetV2 0.35, INT8 quantized, occupying ~81.3 KB flash and ~137.7 KB RAM, while achieving 61 ms inference time per frame (16.3 FPS) for smooth real-time detection.
-
Wide field-of-view perception – A 120° field of view (FoV) is achieved using a three-camera setup, significantly improving environmental awareness compared to a single forward-facing camera.
-
Helmet-mounted, rider-centric perspective – Model is trained on data captured from a helmet-level viewpoint, ensuring alignment with real riding conditions and improving robustness.
-
End-to-end Edge pipeline – Complete workflow:
on-device data collection → labeling & augmentation → FOMO training in Edge Impulse → deployment via OpenMV/MicroPython → real-time inference and alerting -
Multi-modal safety feedback – Provides instant alerts through on-frame overlays, RGB LED indicators, along with real-time audio feedback via Bluetooth using a text-to-speech system for intuitive rider interaction.
📁 Repository Structure
.
├── data_collection/ # Scripts for on-device image capture using Nicla Vision + push button
├── dataset/ # Generated dataset organized in folders
├── deployment/ # Contains Nicla Vision and Raspberry PI code
├── images/ # results
└── README.md # Project overview and documentation (this file)
🚥 Problem Statement
Riders — motorcyclists and cyclists — often miss or fail to react to traffic signs in time due to limited field of view, distractions, or poor visibility. This poses a significant road safety risk, especially in traffic-dense Indian road environments.
- Limited FOV
- Reaction Delay
- No Feedback
However, two-wheeler riders often fail to notice or correctly interpret these signs due to:
- Visual clutter in dense urban environments
- Poor illumination or adverse weather
- Fatigue, distraction, or high cognitive load in traffic
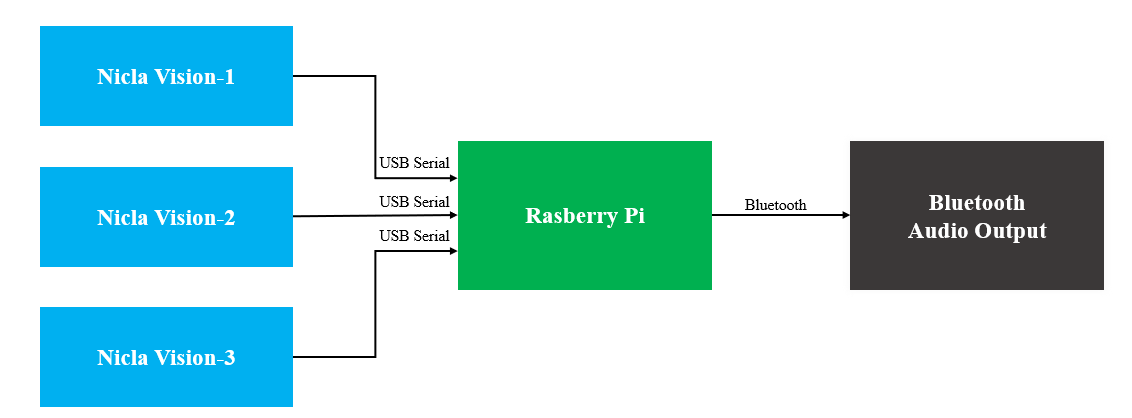
System Block Diagram
This project addresses that gap by exploring how existing helmets can be transformed into an AI Helmet using a compact, low-power Edge AI device. The system perceives its surroundings through computer vision, enhanced by a three-camera setup providing a wide 120° field of view, enabling reliable detection of important signboards in real time. It actively alerts riders through real-time audio feedback via Bluetooth using text-to-speech, ensuring critical information is conveyed instantly without requiring visual attention.
🎯 Project Objectives
The main objective is to develop a prototype AI Helmet module that:
- Captures the rider’s forward-facing view using a compact camera
- Detects several categories of road and place-identification signs in real time
-
Provides immediate feedback via:
- Visual overlays (bounding boxes + labels)
- Audio feed back using Bluetooth speaker
- Runs entirely on-device on a microcontroller-class edge platform (Arduino Nicla Vision), with no cloud dependency
The prototype demonstrates an end-to-end Edge Impulse pipeline:
Data collection → Dataset & labels → FOMO model training → On-device deployment → Real-time alerts in a helmet-mounted setup.
🔧 Hardware & Software Used
Hardware Required
-
🧠 Arduino Nicla Vision
- 2 MP color camera
- 1 MB RAM, 16 MB QSPI flash
- Wi-Fi and IMU on board
-
🔋 USB Power Bank
- For audio feedback
-
💡 Bluetooth Speaker
- For visual alerting based on detected sign type
-
🪖 Two-wheeler Helmet ( 3 cameras attached for 120 degree Field of View)
- To mount the Nicla Vision and power bank
-
🔌 Jumper wires / mounting accessories
- For wiring, fixing the board, and cable management
Software & Tools Used
-
🧪 Edge Impulse Studio
- Data ingestion, labeling, impulse design, FOMO model training, deployment
-
🖥️ OpenMV IDE
- Writing and flashing MicroPython deployment scripts to Nicla Vision
-
🐍 MicroPython
🧱 Hardware Platform
Core device: Arduino Nicla Vision
Nicla Vision is used because it combines:
- 📷 2 MP color camera
- 🧠 1 MB RAM and 16 MB QSPI flash
- 📏 Tiny form factor suitable for helmet or bike mounting
- 💻 Support for MicroPython, OpenMV, and Wi-Fi
These capabilities make it possible to:
- Capture road scenes from a helmet-like viewpoint
- Run Edge AI / TinyML models locally
- Stream annotated video to a browser (for debugging and visualization)
📸 Data Collection
Data collection is done directly on the Nicla Vision using the scripts in data-collection/:
- A USB power bank powers the setup for portable use.
-
A MicroPython script running on the Nicla Vision:
- Captures an image from the onboard camera
Using this simple setup, we collected images of real sign boards around the IISc.
🧮 Dataset & Augmentation
The captured images are imported into Edge Impulse for dataset preparation.
- Cropping and mild geometric transforms
- Grayscale conversion and brightness/exposure changes
- Hue and saturation adjustments
- Blur and noise injection
Sign-board classes:
Go slowNo honkingParkingRoad humpSpeed limit
Dataset stats:
- ~30 images per sign class
- 172 images total across all classes
- An additional background class (added by Edge Impulse) represents scenes with no sign board, helping the model distinguish meaningful signs from ordinary road backgrounds.
🏷️ Annotation & Labeling
Bounding box annotation is carried out inside Edge Impulse using its labeling interface:
- All labels are then manually generated where needed.
This strategy significantly speeds up labeling while maintaining high annotation quality suitable for embedded object detection.
🧠 Model Design: FOMO for TinyML
We use Edge Impulse FOMO (Faster Objects, More Objects) for TinyML-based object detection.
Model Architecture
- Backbone: MobileNetV2 0.35 (lightweight CNN)
- Detection head: FOMO (grid-based object detection)
- Designed to provide class + approximate location while fitting into a microcontroller memory and compute budget.
Input Configuration
- Input image: 96 × 96 RGB
- Flattened feature dimension: 27,648 (96 × 96 × 3)
Output Classes
The model predicts 5 object classes (non-background):
Go_slowParkingRoad_humpSpped30NoHorn
Train / Test Split
- 79% of samples used for training
- 21% used for testing
- 20% of the training set is further reserved as a validation set
🧪 Training Details (Edge Impulse)
The Keras-based object detection block in Edge Impulse uses a FOMO-specific training script with:
- Loss: Weighted cross-entropy (using
object_weightto emphasize objects vs. background) - Epochs:
100 - Learning rate:
0.001 - Batch size:
128 - Backbone width multiplier (alpha):
0.35 - Checkpointing: Best weights selected based on validation F1 score (
val_f1)
After training, an explicit softmax layer is added to ensure per-cell probabilities are properly normalized.
Validation (Quantized int8 Model)
On the validation set, the quantized (int8) model achieves:
- F1 score (non-background):
0.96 - Precision (non-background):
0.98 - Recall (non-background):
0.94
On-Device Performance (Nicla Vision)
Using the TensorFlow Lite engine for the Arduino Nicla Vision, Edge Impulse reports:
- Inferencing time: ≈ 61 ms per frame
- Peak RAM usage: ≈ 137.7 KB
- Flash usage: ≈ 81.3 KB
This corresponds to roughly:
~16.3 frames per second (fps)
which is sufficient for real-time detection and alerting on the helmet.
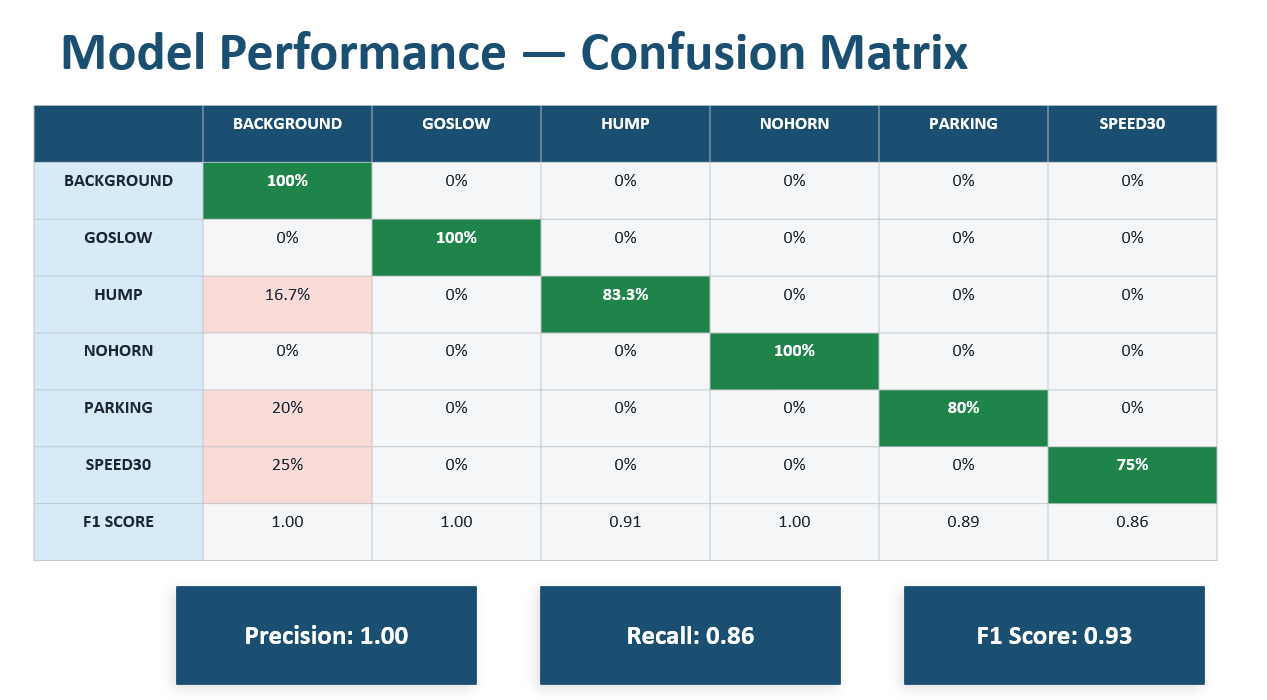
Model Performance
The performance of the model is evaluated using test dataset and various metrics were calculated. The model has performed satisfactorily and the metrics are summarized below:
🧩 Impulse Design (Edge Impulse)
The complete impulse in Edge Impulse consists of:
-
Input block:
- Type: Image data
- Device: Arduino Nicla Vision
- Resolution: 96 × 96 RGB
-
Processing block:
- Type: Image (DSP)
- Operations: resize, color handling, normalization
-
Learning block:
- Type: Object Detection (Images)
- Architecture: FOMO MobileNetV2 0.35
- Output: 5 object classes + background (grid-based localization)
🚀 On-Device Deployment (OpenMV + MicroPython)
Deployment is done via the scripts in deployment/OpenMV/.
After training and validation:
- The model is exported from Edge Impulse as an OpenMV-compatible library (TFLite model + C++/MicroPython support code).
- The deployment is done via the OpenMV IDE onto the Arduino Nicla Vision.
The final deployed script:
- Is based on auto-generated Edge Impulse code
- The final deployed scripts are available in
deploymentfolder.
Runtime Behavior
At runtime, the MicroPython/OpenMV script running on Nicla Vision:
-
Initializes:
- Threee camera (RGB565, QVGA, 240×240 window)
-
Continuously:
- Captures frames from the onboard camera
- Applies the same preprocessing used during training
- Runs FOMO inference on each frame
- Draws bounding boxes and overlays the detected label on the image
- The predictions of each camera is send to Raspberry PI and it connects to a bluetooth speaker for audio feedback.
This combination of real-time detection, visual overlays, and simple acoustic/visual alerts allows the Nicla Vision module to act as an AI Helmet assistant without any cloud processing.
System Prototype

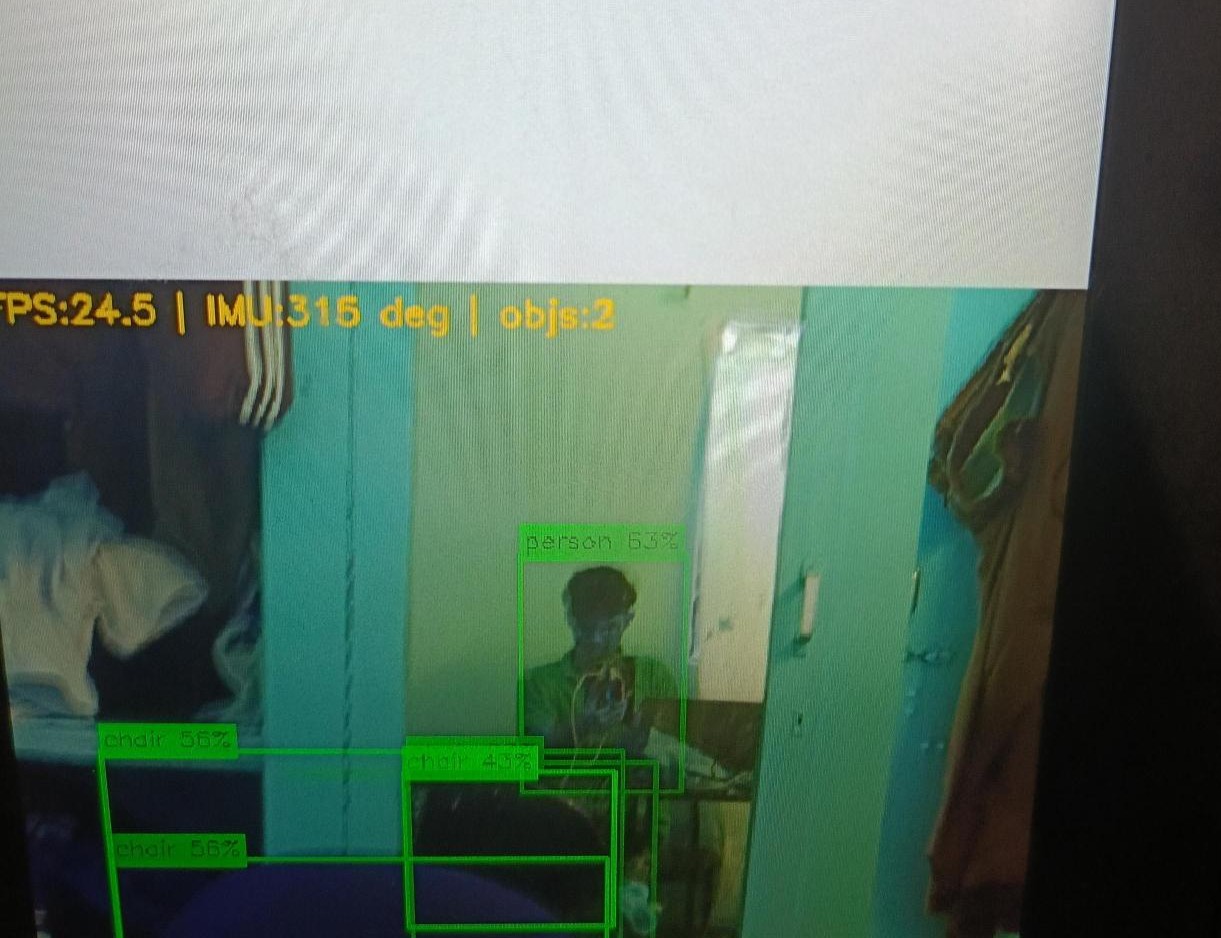
🎬 Demo (Real-Time Detection)
Below are example frames from the real-time detection pipeline running on the AI Helmet prototype:
Demo 1

Demo 2

Achievements
- 92.6% F1 score on 5-class traffic sign detection
- int8 quantized FOMO model running at 61ms inference
- 3-camera coverage with USB serial pipeline to Pi
- Priority-based audio announcement via Bluetooth
- Deduplication to prevent repeated announcements
Challenges
- Multi-camera synchronization for 120° FoV
- Edge AI resource constraints - Arduino Nicla Vision
- Robustness in real-world conditions
- Low-latency audio feedback
Planned Improvements
In future iterations, we plan to:
- Upgrade to Raspberry Pi 5 + Hailo NPU for faster inference
- Expand dataset with more Indian road sign classes
- Add GPS tagging to log sign locations
- Helmet integration with vibration haptic alerts
- Natural TTS voice (gTTS) with internet connectivity
References
- https://github.com/samy101/ai-helmet
- ChatGPT
- Claude AI