AI–Based Intrusion Detection System for CAN Bus Security
Introduction
Modern vehicles and industrial controllers rely on the CAN bus for real–time communication among ECUs. Because CAN has no built-in authentication or encryption, it is vulnerable to spoofing, flooding, and fuzzing attacks. This project demonstrates an edge-AI IDS: an Arduino-based CAN traffic generator simulates benign and malicious frames, while a Raspberry Pi Pico monitors the bus, extracts features in real time, applies a compact Decision Tree model, and raises alerts via USB CDC with sub-millisecond latency.
- CAN Vulnerabilities: No frame integrity or source authentication.
- Attack Scenarios: Denial-of-Service flooding, fuzzing, impersonation.
- Existing Defenses: Hardware firewalls add cost; cloud analytics add latency.
- Edge AI Advantage: Local inference on microcontrollers ensures low latency and resilience.
Methodology
About the Setup and Flow
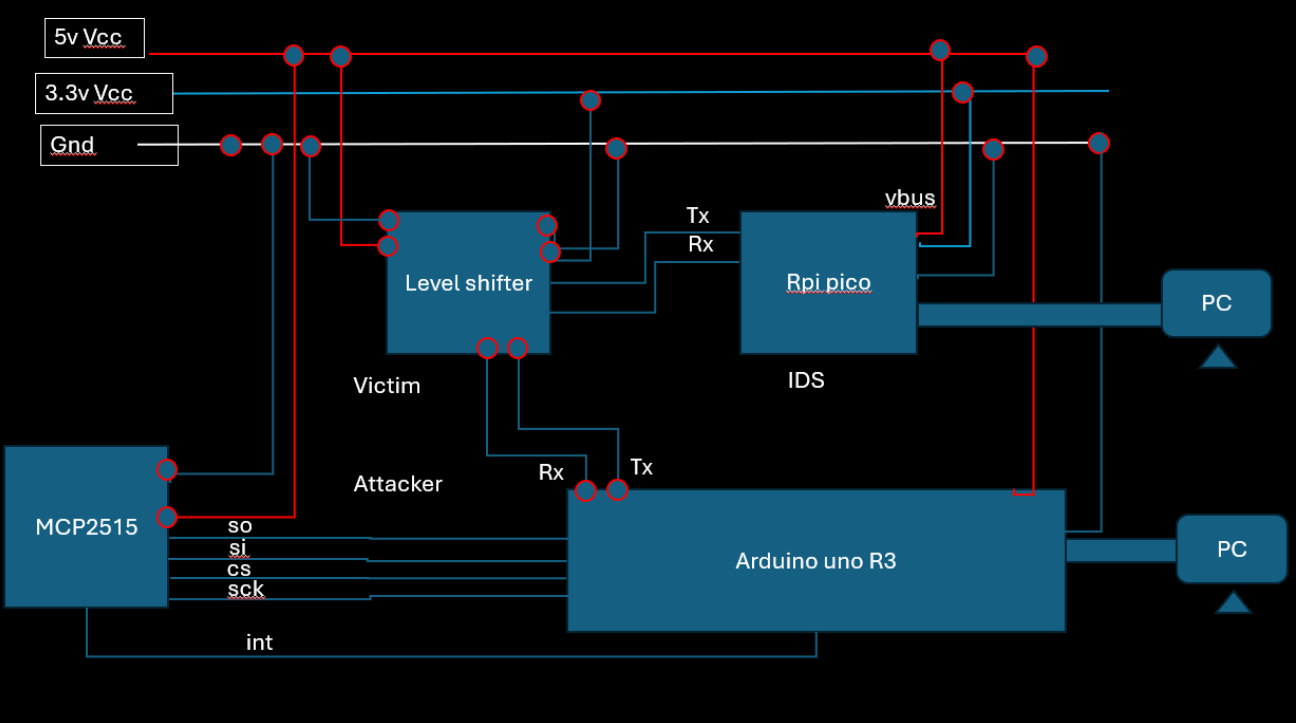
Two physical nodes share a single CAN bus:
- Attack Node: Arduino Uno R3 + MCP2515 — generates four traffic modes (Valid CAN sweep, DoS, Fuzzy, Impersonation) and mirrors each frame as Lawicel ASCII over UART.
- IDS Node: Raspberry Pi Pico + MCP2515 — listens in parallel, timestamps and parses UART frames, extracts features, classifies each frame, and logs alerts over USB CDC.
Flow Diagram (placeholder):
Figure 2: Data Flow Between Nodes
About the MCP2515
The MCP2515 is a stand‑alone CAN controller interfacing via SPI to microcontrollers. Key specifications:
- 8 MHz crystal, up to 1 Mbps CAN speed
- Two 8-byte RX FIFOs and three TX buffers
- Six message acceptance filters with masking
- INT pin indicates RX/TX events
- Requires 120 Ω termination on CAN H and CAN L
<!–
3.3 Selection of Models and Testing Accuracy
(Summary in section 3.4 and Table 1 below.) –>
Attack Node and Victim Node
Attack Node Modes:
- Valid CAN Data (Score 0): benign sweep of known IDs at 10 fps
- DoS Attack (Score 1): ID
0x000at 3 kfps - Fuzzy Attack (Score 2): random ID and payload at 3 kfps
- Impersonation (Score 3): ID
0x105with fixed malicious payload
Model performance (comparison of tree-based classifiers):
| Model | Accuracy | Precision | Recall |
|---|---|---|---|
| Decision Tree | 83.5 % | 84.2 % | 85.0 % |
| Random Forest | 89.2 % | 90.1 % | 91.3 % |
| XGBoost | 91.0 % | 92.0 % | 92.5 % |
Table 1: Comparison of tree-based classifiers.
Decision Tree was selected for its minimal code size (~30 kB) with acceptable accuracy.
- Victim Node: Captures mirrored UART frames, extracts 19 features, applies Decision Tree inference, and prints scores/alerts in real time.
Data Collection
We collected a total of 5.4 million CAN frames in four categories:
- Attack free (Valid, Score 0): 800k frames each for three runs (2.4M total)
- DoS Attack (Score 1): 1M frames on ID
0x000 - Fuzzy Attack (Score 2): 1M frames with random IDs/payloads
- Impersonation (Score 3): 1M frames on ID
0x105
Each log entry used the format:
Timestamp: 0.123456 ID: 080 000 DLC: 8 AA BB CC … FF
Feature Explanation and Importance
We extract 19 features per frame. Together they capture payload content, timing, and structural anomalies:
- CAN ID: Numeric identifier; unexpected IDs signal spoofing/impersonation.
- DLC (Data Length Code): Byte count; abnormal DLC patterns indicate malformed frames.
- Byte 0 … Byte 7: Each raw payload byte; basis for content analysis.
- Payload Sum: Sum of 8 bytes; sudden jumps reveal bulk data changes (fuzzing).
- Payload Mean: Average byte value; detects systematic zero fills (DoS).
- Payload Std: Standard deviation; low for static payloads, high for random fuzzed data.
- Entropy: Shannon entropy of byte distribution; high for random data, low for repetitive patterns.
- Timestamp Diff: Time since last same-ID frame; short intervals indicate flooding.
- MessageFrequency: Cumulative count per ID; rapid growth flags high-rate attacks.
- InterArrival: Difference of successive Timestamp Diff; measures burstiness and irregular timing.
- DLC Variability: Rolling std. dev. of DLC; fluctuating DLC suggests fuzzing.
- ErrorFrame: Flag if DLC == 0; error frames may arise from collisions or intentional faults.
- RollingWindowRate: Frames per second in sliding window; sustained high rates → DoS.
- PayloadRepetitionCount: Count of identical payloads per ID; replay attacks manifest here.
- ByteCorrelation: Correlation between bytes across recent frames; structural payload changes trigger anomalies.
- EntropyTrend: Change in entropy over window; sudden increases indicate fuzzing onset.
- TimestampDrift: Deviation from expected inter-frame gap; bus congestion or tampering effects.
- FrameSizeRatio: DLC/8 ratio; abnormal small or full-size patterns suggest malicious framing.
- WhitelistFlag: Binary indicator if ID is in known safe list; unknown IDs treated as impersonation candidates.
Model Development and Compression
- Built a dataset with 5.4M samples × 19 features.
- Stratified 80/20 train/test split.
- Trained a Decision Tree (max depth = 6).
- Obtained Accuracy 83.5 %, Precision 84.2 %, Recall 85.0 %.
- Exported via
m2cgento C code (model.c/model.h), size ~30 kB.
Deployment
The Pico firmware (main.c) implements:
- Robust S-LCAN parsing (3–4 digit IDs, padded payloads).
- Inline feature extraction and
score(feat)invocation. - USB CDC output via
printf().
Prototype and Demonstration
Live console example:
[RX] t0008AABBCCDDEEFF
Score 0
[RX] t0008AABBCCDDEEFF
Score 1
Challenges and Workarounds
- MCP2515 failure → Arduino-only loopback with simulated latency.
- UART conflict → moved Pico UART to
SoftwareSerialon D8/D9. - USB enumeration delay → added
sleep_ms(1500)and enabled CDC in CMake.
Project Resources
- Code repository: https://github.com/Manoj-prog-use/EdgeAI_CANIDS/tree/main
- Arduino sketch:
attack_modes.ino -
Pico firmware:
main.c,model.c,CMakeLists.txt - Training notebook:
CAN_IDS_DF.ipynb