Feature Estimation and Object Identification
Introduction
This report presents a project that explores a novel approach to feature estimation and object identification using ultrasound and camera sensors on edge devices. Leveraging the relationship between object shape and distance as a function of the scanning angle of the ultrasound sensor, the system identifies unique features of objects effectively, even in dark or nighttime conditions [1].
When integrated with a camera, the system achieves enhanced performance, even in low-light environments [2]. By employing sensor fusion, the system combines ultrasound and vision-based sensing to enable accurate object classification while optimizing computational and power efficiency.
The hardware setup includes edge devices such as the Arduino Nano BLE Sense and Nicla Vision, complemented by machine learning-based techniques. This hybrid approach is specifically designed for edge devices, addressing the significant resource constraints inherent to such platforms.
Radar/Sonar-Based Feature Extraction
- Objects exhibit distinct return profiles based on their shape, orientation, and location relative to the sonar or radar system.
- By capturing these return profiles under varying conditions, a machine learning (ML) model can be trained to classify object types — for instance, different aircraft models.
- The novel approach leverages variations in sonar signatures to enable reliable object recognition.
Fig. 1: Return Signal profile for objects of different shape
Unlike optical systems, radar-based classification operates effectively under all weather conditions and during both day and night.
Methodology
Ultrasound Sensor for Distance Measurement
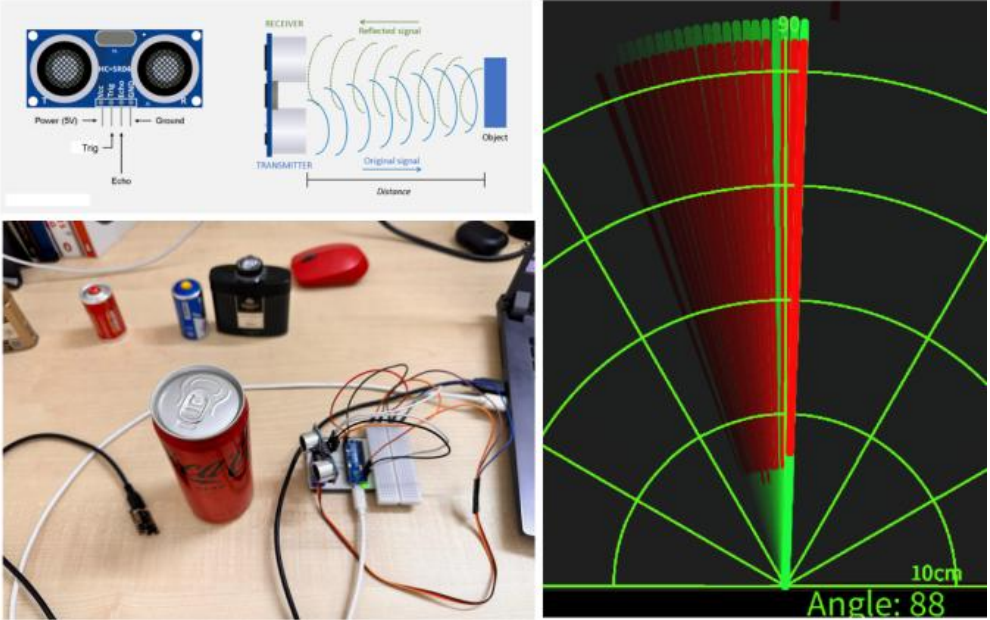
The HC-SR04 Ultrasound Sensor is utilized for measuring the distance of objects. Ultrasound waves are emitted, and the time taken for their return is used to calculate distance.
Key Advantages
- Ambient Light Independence: Functions effectively in both bright and dark environments.
- Environmental Tolerance: Resilient to dust and fog.
- Cost Efficiency: A low-cost alternative to other distance-measuring technologies.
Servo Motor for Angular Scanning
The ultrasound sensor is mounted on a servo motor, enabling angular scanning across a predefined range.
- Angular Range: Scans across multiple angles to generate a 2D object signature.
- Distance-Angle Relationship: Captures a unique profile for objects based on shape.
Vision Sensor for Enhanced Classification
To overcome the limitations of ultrasound (e.g., inability to distinguish same-shaped objects of different colors or textures), a Nicla Vision sensor is integrated.
- Lightweight ML Model: Runs on-device for efficient object classification.
- Optimized Parameters: Minimizes parameters for efficient edge deployment.
Data Collection
Ultrasound:
- Captured unique distance-angle signatures for various objects (e.g., battery, talc container, can).
- Scanned objects at multiple distances, angles, and orientations.
Fig. 2: Ultrasound Sensor and its working principle (top left), Integrated hardware system (bottom left), Distance profile vs. scanning angle (right)
Camera:
- The same objects were captured using the Nicla Vision under varying lighting conditions.
- Data used to train an ML model to ensure robust performance in diverse scenarios.
Model Development and Compression
- Signature Analysis: ML models analyze distance vs. angle relationships.
- Shape-Based Classification: Initial classification relies on object geometry.
Fig. 3: Training results for ML model over collected dataset
- Leveraged Edge Impulse to train and optimize the model.
- Deployed model as 8-bit quantized version on Arduino-compatible hardware.
Fig. 4: Accuracy and loss metrics from Edge Impulse training
Despite high accuracy for geometrically distinct objects, the system struggles to differentiate objects with similar shapes (e.g., cans of different brands).
To address this:
- Integrated camera-based classification.
- Employed lightweight ML model to detect color or texture.
Fig. 5: Edge Impulse used to develop and quantize camera data model using FOMO.
Sensor Fusion
- Combines ultrasound and camera data for enhanced classification.
- Maintains minimal computational overhead.
Model Deployment and Demo
Sensor fusion of ultrasound and vision data leads to:
- Improved Accuracy: Combines shape + texture features.
- Efficient Resource Use: Reduces overall model size and complexity.
- Environmental Robustness: Works well in low-light and dusty environments.
Fig. 6: Ultrasound detects a “can” but cannot distinguish between Coke and Sprite.
Vision Sensor-Based Model
- Lightweight & Edge-Optimized
- Differentiates similar-shaped but visually distinct objects.
- Complementary Role to the ultrasound model.
Fig. 7: Camera sensor output for same-shaped objects (Sprite vs Coca-Cola)
Scalability with Advanced Sensors
Though this system uses an ultrasound sensor, it is designed to support higher-resolution sensors in the future:
- Enhanced Resolution: Radar/LiDAR provide finer details.
- Future-Proof Architecture: Can integrate LiDAR or advanced radar in real-world applications.
Challenges and Workarounds
- Integration Challenge: Difficulty in syncing data between ultrasound and Nicla Vision.
- Solution: Used a separate serial port for reliable data exchange.
Conclusion
This project demonstrates a successful hybrid edge AI system combining ultrasound and vision sensors for real-time object classification and distance estimation.
- The fusion approach addresses limitations of individual sensors.
- Designed specifically for edge applications with limited resources.
- Lays the foundation for scalable and efficient sensor fusion solutions.
References
- HC-SR04 Datasheet or technical paper discussing the sensor’s features.
- Nicla Vision documentation or technical paper on its imaging capabilities.
- Edge Impulse documentation or relevant literature discussing edge-based ML deployment.
- Edge Intelligence: Architectures, Challenges, and Applications
- Dianlei Xu, Tong Li, Yong Li, Xiang Su, Sasu Tarkoma, Tao Jiang, Jon Crowcroft, Pan Hui